Компьютеризированные ПЛК для оптимизации обработки данных в АУТС
(Опубликовано в журнале «Вестник Электроники» №2 2016)
Скачать статью в формате PDF (284 КБ)
25 Янв 2017
Во многих отраслях промышленности используется автоматически управляемое транспортное средство (АУТС). Благодаря появлению новых технологий, таких как датчики, беспроводные сети и автоматизированные технологии управления, методы управления и масштабы различных систем продолжают расти и развиваться, и теперь компактные легкие безрельсовые АУТС начинают производиться серийно. В статье представлен проект системы управления на базе компьютеризированного ПЛК, реализованный для американского интегратора АУТС.
Американский интегратор АУТС-решений cпроектировал транспортное средство с лазерным позиционированием для выполнения погрузочно-разгрузочных операций на заводе по сборке автомобилей. Поскольку ранее завод АУТС использовал систему управления на базе ПЛК, в которой не было достаточного количества функций, чтобы соответствовать новым требованиям управления, компания решила модернизировать систему и перейти к компактной системе управления на базе компьютеризированного ПЛК, которая лучше подходит для новой компактной конструкции транспортного средства, способного интегрироваться с системами верхнего уровня с помощью одного программного приложения.

Системные требования
Клиент имел несколько требований к этому проекту. Во-первых, новое оборудование должно было быть достаточно компактным и прочным, чтобы функционировать в суровых заводских условиях, а еще одним важным требованием был качественный и бесперебойный канал связи между системой лазерного наведения и диспетчерским пунктом.
Для обеспечения этой стабильности системный интегратор использовал беспроводные устройства промышленного класса с более широким покрытием сети и высокой выходной мощностью. Кроме того, требовалось, чтобы любая система, поставленная системным интегратором, была способна поддерживать ранее установленную версию Linux (Debian Wheezy X64).
Внедрение системы

Рис. 1. APAX-5580
В основу системы лазерного позиционирования входит APAX-5580 (рис. 1) – управляющее вычислительное устройство с тремя модулями (APAX-5490, APAX-5046, APAX-5040), которое было подключено к устройству позиционного управления и реле безопасности. Для обеспечения беспроводного соединения с диспетчерским пунктом и EKI-5525, а также EKI-6331AN, эти устройства были подключены к APAX-5580. Сенсорный монитор IDS-3110 был установлен на внешней стороне системы лазерного наведения.
APAX-5580 сочетает в себе возможности ПЛК и ПК, но является компьютеризированной открытой платформой управления, предназначенной для обеспечения промышленной вычислительной производительности и интеграции различных модулей ввода/вывода. Благодаря безвентиляторному исполнению, низкому энергопотреблению, ультра-компактному корпусу и безкабельному соединению данный контроллер особенно подходит для применения в системе автоматического управления лазерного позиционирования, которая требует высокой стабильности в ограниченном пространстве. Чтобы защитить операционную систему и ее данные, APAX-5580 также включает в себя mSATA SSD промышленного уровня с антишоковыми и антивибрационными свойствами. На случай возникновения системной ошибки ПЛК снабжен SD-картой для восстановления системы, которая позволяет пользователям быстро вернуть систему к заводским настройкам по умолчанию. Данный ПЛК также является готовой платформой для встраиваемых приложений. Вне зависимости от того, что требуется для целевого применения клиента, пользователи могут в полной мере использовать набор интерфейсов ввода/вывода для подключения широкого спектра периферийных устройств, таких как цифровые/аналоговые сигналы, сети Ethernet, мониторы компьютеров, карты памяти и т.д. Кроме того, данный ПЛК может поддерживать несколько операционных систем и драйверов, чтобы сократить время разработки ПО для системных интеграторов.
Для связи с диспетчерским пунктом система лазерного позиционирования также включает в себя небольшой 5-портовый коммутатор EKI-5525 Fast Ethernet Proview и EKI-6331AN IEEE 802.11 A/n Wi-Fi AP. Чтобы обеспечить доступность и удобство управления системой лазерного позиционирования, оператор использует 10.4» TFT LCD IDS-3110. Имея ультратонкий дизайн и безрамную конструкцию, монитор отлично подходит для применения в компактных системах лазерного позиционирования транспортных средств.
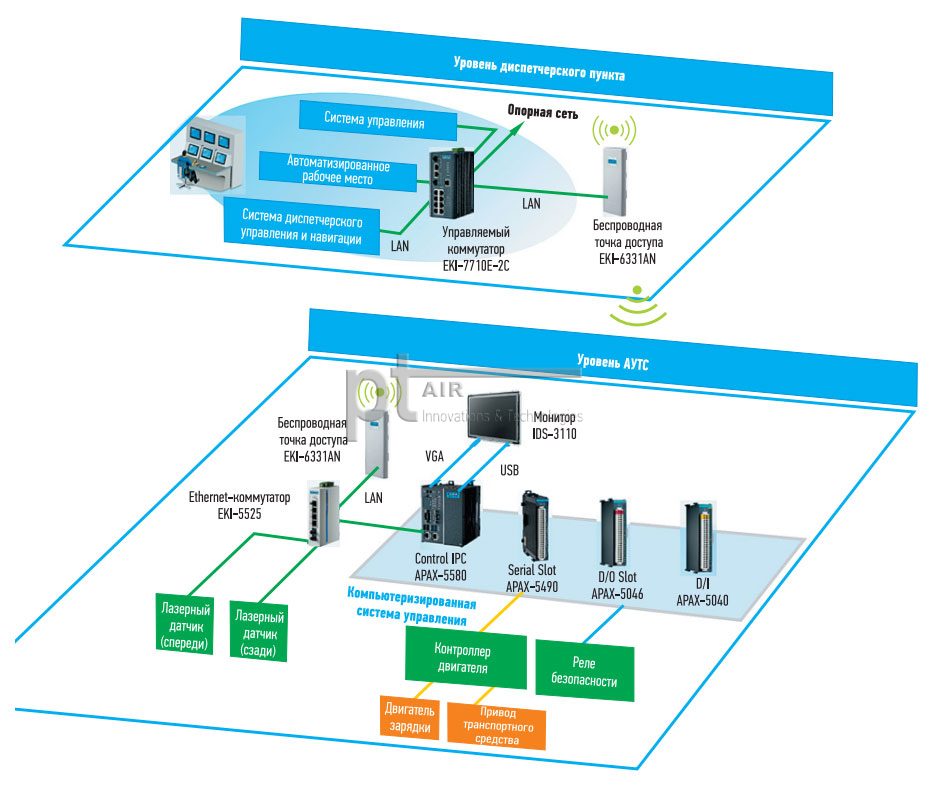
Рис. 2. Структура системы на основе компьютеризированного ПЛК
В диспетчерском пункте установленный управляемый коммутатор EKI-7710E отвечает за передачу сигналов к EKI-6311 для дальнейшего распространения сигнала по всему предприятию. EKI-7710 является функционально полноценным управляемым резервным коммутатором, который обеспечивает резервирование сети на автосборочном заводе и имеет высокую выходную мощность для надежного охвата и скорости передачи данных, 2×2 MIMO (Multiple Input Multiple Output) для оптимизации передачи данных, а также поддерживает широкий диапазон рабочих температур (–20…70 °C) со степенью защиты IP55.
Схематичное изображение полученной системы представлено на рис. 2.
***
По сравнению с системой управления на основе ПЛК, система на основе компьютеризированного ПЛК является усовершенствованной и доработанной версией первого. Открытая платформа управления ПЛК предоставляет множество дополнительных функций для системных интеграторов, чтобы они могли быстро и удобно создавать свои приложения. Вышеуказанные аппаратные средства и профессиональное программное обеспечение снижают риски при разработке систем и способствуют избавлению от трудоемкого процесса тестирования совместимости. Потребовалось всего две недели, чтобы подготовить план решения для клиента и предоставить ему образцы для тестирования, а в итоге способствовать разработке стабильной и надежной системы лазерного позиционирования транспортных средств для операций погрузки-разгрузки на территории автомобилесборочного завода.